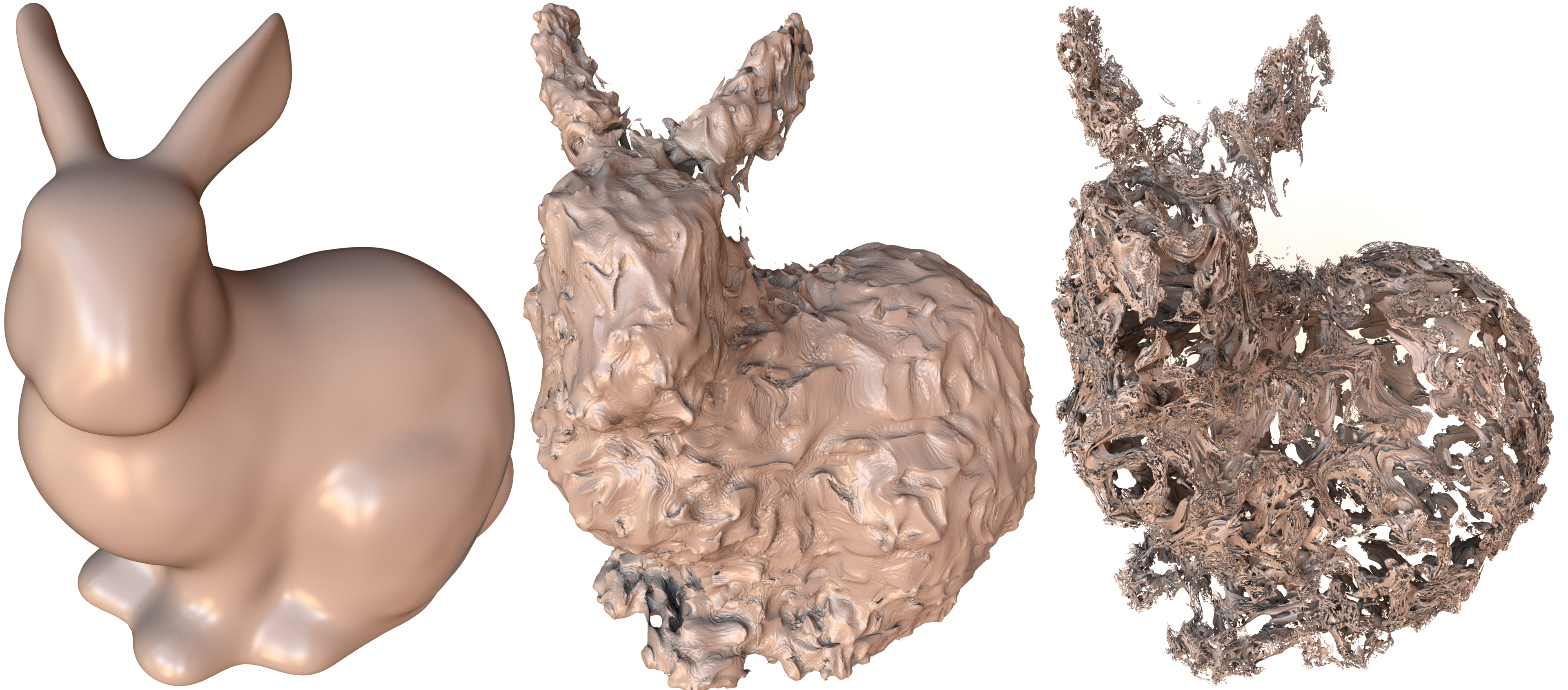
Left to right: (a) The original Bunny. (b) Julia set of the 331-root rational map found by our optimization. (c) Highly intricate surface obtained by translating the roots by 1.41 in the z direction. Click the image to see a high-resolution version.
Abstract
We present the first 3D algorithm capable of answering the question: what would a Mandelbrot-like set in the shape of a bunny look like?
More concretely, can we find an iterated quaternion rational map whose potential field contains an isocontour with a desired shape? We show
that it is possible to answer this question by casting it as a shape optimization that discovers novel, highly complex shapes. The problem can
be written as an energy minimization, the optimization can be made practical by using an efficient method for gradient evaluation, and convergence
can be accelerated by using a variety of multi-resolution strategies. The resulting shapes are not invariant under common operations such as translation,
and instead undergo intricate, non-linear transformations.
This work was supported by a UCSB Regents Junior Faculty Fellowship, and National Science Foundation CAREER award (IIS-1253948). Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation. I acknowledge support from the Center for Scientific Computing from the CNSI, MRL: an NSF MRSEC (DMR-1121053) and Hewlett Packard.